全国服务热线
0769-85333197全国服务热线
0769-853331972021-11-16 10:16:06 0
AGV舵轮组介绍
如下图1所示,方向盘是一个不熟悉的专业名称,是一个新兴的智能高科技产业链。所谓方向盘,是因为它集传动、转向、减速等机械结构为一体,产品集行走、牵引、转向功能为一体,能装载和牵引重物是的可以快速部署AGV、移动机器人等。完全满足AGV的应用要求。因此,方向盘是AGV应用的发展方向。与传统的AGV相比,本实用新型的方向盘更加一体化、方便、准确、响应速度快。

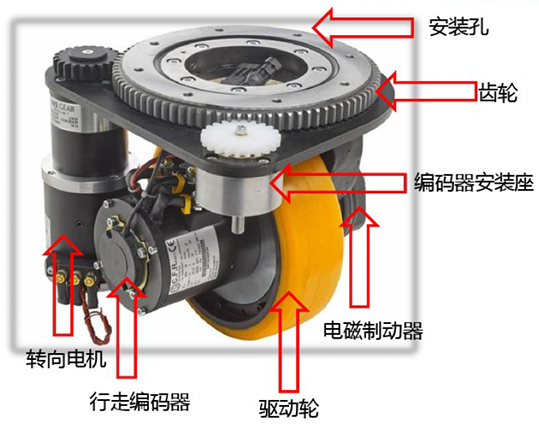
方向盘主要由电机、变速箱、减速器、编码器、方向盘、方向盘、制动器、限位开关等组成。如下图2所示。

方向盘机构包括:
驱动电机为直流电机与传动箱组合,采用反对称安装方式。该方法在两轮同轴且功率较大的情况下,可大大减小轮座,节省机器人体积空间。(通常是发动机功率的一定比例)由于采用了这种安装方式,电机的选择比较广泛,齿轮箱的功能可以增加扭矩,降低转速,也可以利用锁紧与制动器之间的摩擦,提高了电机的使用寿命。当需要停车时,可将轮座延长,以满足轮副的安装要求。
AGV舵轮组产品特点:
体积小:整体设计,体积小,重量轻。
操作简单:自动集成功能集中。
适应能力强:根据移动设备的要求,在核心部件上安装了防震系统,有效地防止了设备的移动,使用过程中对核心部件产生了意想不到的影响。这台机器损坏了。
各种形式:水平/垂直/交流或直流电源;
发动机连接到转向系统。
方向盘形状
方向盘可根据电机安装位置分为两类:水平方向盘和垂直方向盘,如下图3所示.一般高度太低,有些AGV需要高度(例如,潜水AGV必须太低,不能在货物下挖掘)本实用新型的优点是:电机便于绝缘,在某些情况下(如危险品工厂)也便于绝缘。驱动轮需要与外界隔离,此时垂直方向盘使用方便,易于防爆处理。
两个驱动电机均设有大功率齿轮传动机构和上齿轮传动机构,在控制方式中,大功率驱动电机用于控制在方向盘上,用一个低功率转向马达来控制方向盘的转向。电机有两种电源:交流电源和直流电源。直流电源比交流电源稳定,控制简单,水平转向比垂直转向更紧凑,但价格更高。
方向盘结构
AGV的车体结构决定了其行驶和转向方式,并制约着车体的动态特性和运动特性。因此,在设计过程中,首先要根据使用要求确定底盘的结构,然后根据控制对象的模型建立车身的运动学和动力学模型,选择合适的控制根据模型参数确定控制律,以获得满意的控制效果。因此,确定正确的车身结构是建立车身动力学模型的基础。
方向盘既能提供牵引(转向)又能提供主动转向,因此方向盘具有两个自由度。AGV可以使用一个或多个驱动轮向四面八方移动:水平、垂直、就地、倾斜等。舵轮通常用于地面条件较好的室内环境,因此其表面的大部分材料是聚氨酯。驱动轮的运动决定了AGV的重复定位精度,因此驱动轮的质量对AGV的性能有很大的影响。
方向盘
AGV的底盘通常采用单方向盘、双方向盘和四方向盘的形式,为前轮转向控制系统铺平了道路。在汽车的行驶和转向中,实现全方位的行走。驱动轮分别与伺服电机连接,调速轮可同时改变驱动轮的转动方向,从而改变车辆的前进速度和方向。这种结构可以保证车辆的平衡和稳定性,满足工厂对负载的高要求。
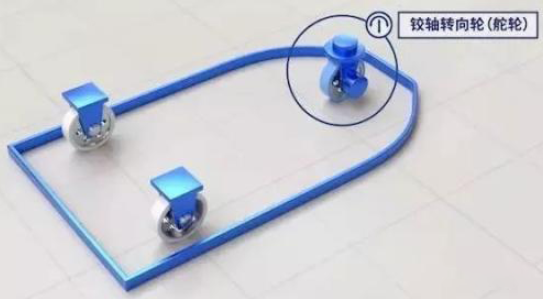
单方向盘
本实用新型的优点是:单轮AGV转向相对简单,与双轮AGV相似,但由于单轮AGV的后轮为从动轮匹配不需要考虑。
缺点:车体由一个方向盘拉动,从而实现相对简单的工作。
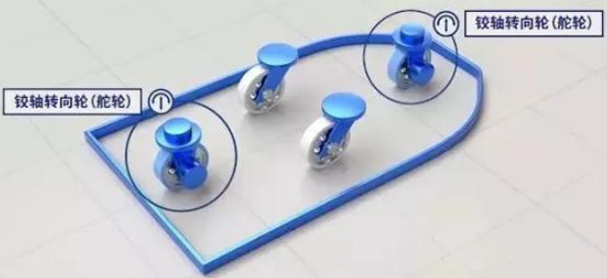
双方向盘
本实用新型的优点是:通过调整两个驱动轮的角度和速度,在不改变车头的情况下,可实现轨道、转向等动作的改变。该模型可以实现任意点的匀速转弯运动,具有很强的灵活性。
缺点:两组转向轮增加了成本,AGV在机动过程中往往需要对两组转向轮进行协调控制,这就要求AGV和控制,增加了开发难度和成本。
四轮驱动
AGV小车采用四轮驱动,轮系布置结构如下图4所示。四个轮子分别是方向盘和方向盘,每个轮子上有两个电机分别控制,电机控制车辆的行驶,电机控制车辆的转向,可以实现车辆在纵向、横向、旋转等方向。整个方向盘具有驱动灵活、能在狭小空间内自由移动、无需算法麻烦等优点。本实用新型通过匹配转速和旋转方向,可以实现移动车辆的全方位运动。缺点是整个结构比较复杂。
四轮转向的全方位结构
方向盘控制
AGV车辆通过内部和外部传感器感知外部环境信息和状态,并完成相应的动作。AGV车辆根据从转向传感器获得的位置信息向车辆控制器发送车辆信号,并根据车辆提供的目标值计算车辆的实际行驶值。道路.因此,控制方向盘,AGV车辆根据行驶路线在路面上行驶。因此,方向盘的协调控制非常重要。控制方向盘保持同步,可以控制地面AGV车辆的前进、后退、旋转、转弯等一系列动作。







技术微信